二叉树
树 (Tree)
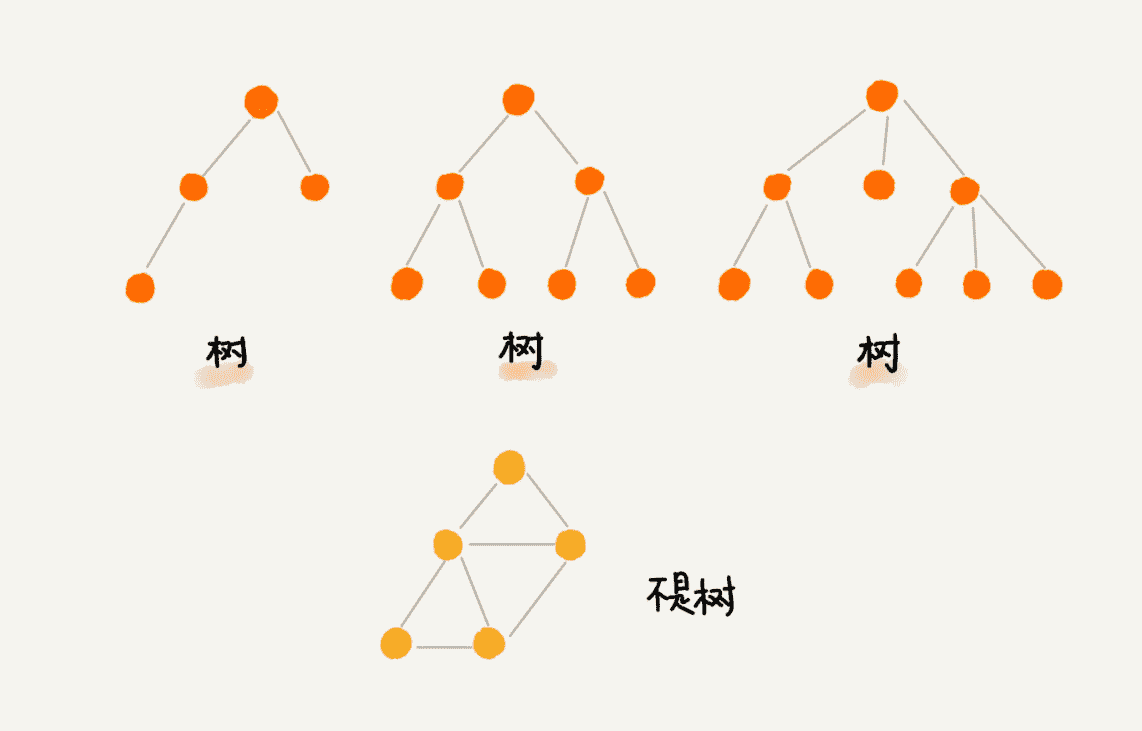
这里面每个元素我们叫作“节点”;用来连线相邻节点之间的关系,我们叫作“父子关系”。
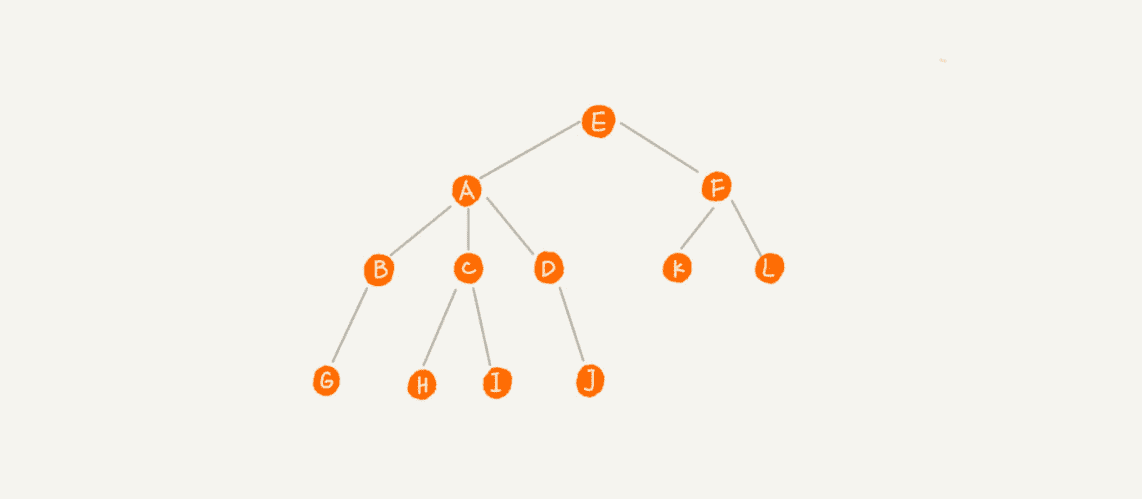
比如下面这幅图,A 节点就是 B 节点的父节点,B 节点是 A 节点的子节点。B、C、D 这三个节点的父节点是同一个节点,所以它们之间互称为兄弟节点。我们把没有父节点的节点叫作根节点,也就是图中的节点 E。我们把没有子节点的节点叫作叶子节点或者叶节点,比如图中的 G、H、I、J、K、L 都是叶子节点。
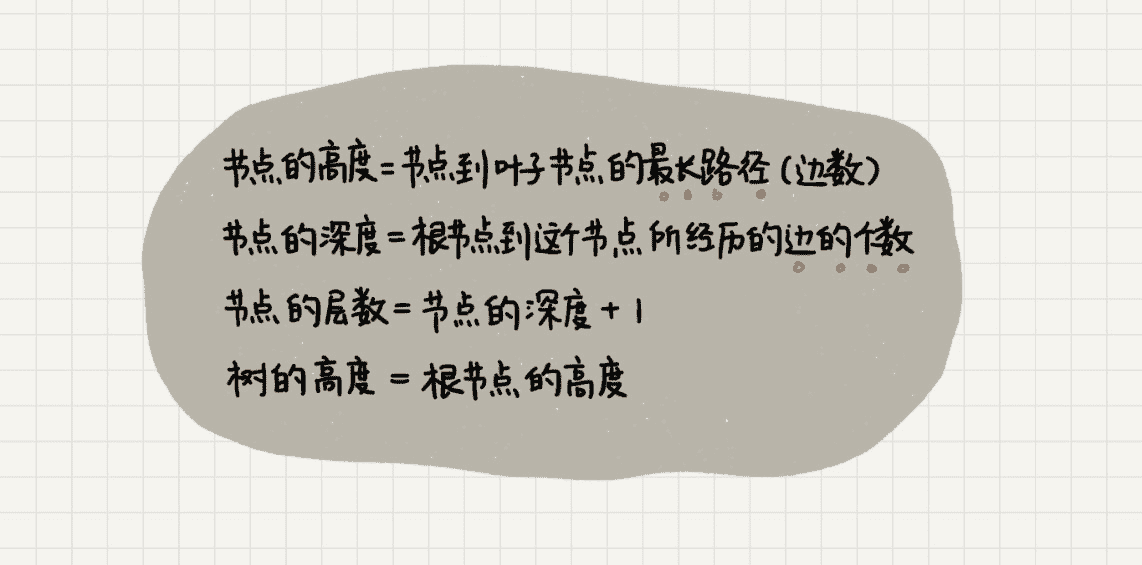
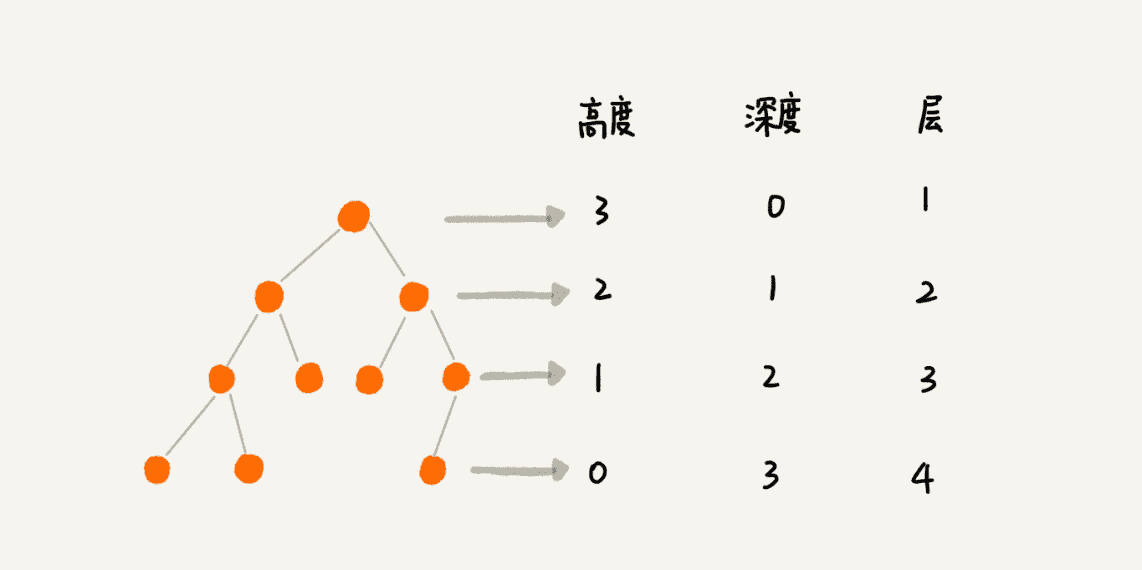
还有三个比较相似的概念:高度(Height)、深度(Depth)、层(Level)。它们的定义是这样的:
举例说明下:
二叉树 (Binary Tree)
二叉树,顾名思义,每个节点最多有两个“叉”,也就是两个子节点,分别是左子节点和右子节点。不过,二叉树并不要求每个节点都有两个子节点,有的节点只有左子节点,有的节点只有右子节点。
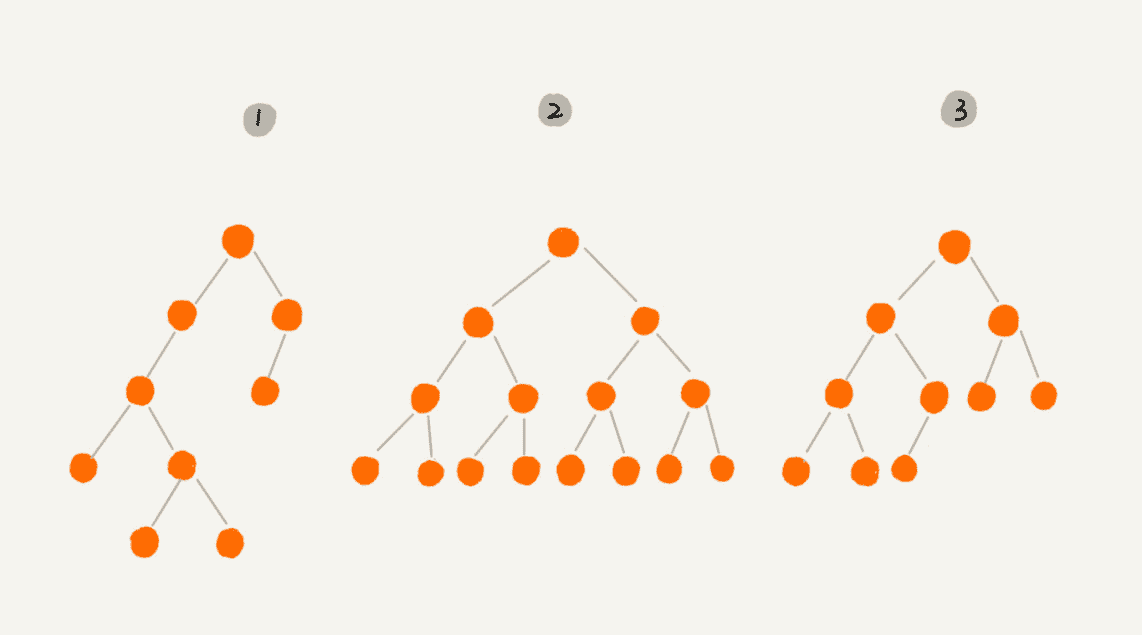
这个图里面,有两个比较特殊的二叉树,分别是编号 2 和编号 3 这两个。
其中,编号 2 的二叉树中,叶子节点全都在最底层,除了叶子节点之外,每个节点都有左右两个子节点,这种二叉树就叫作满二叉树。
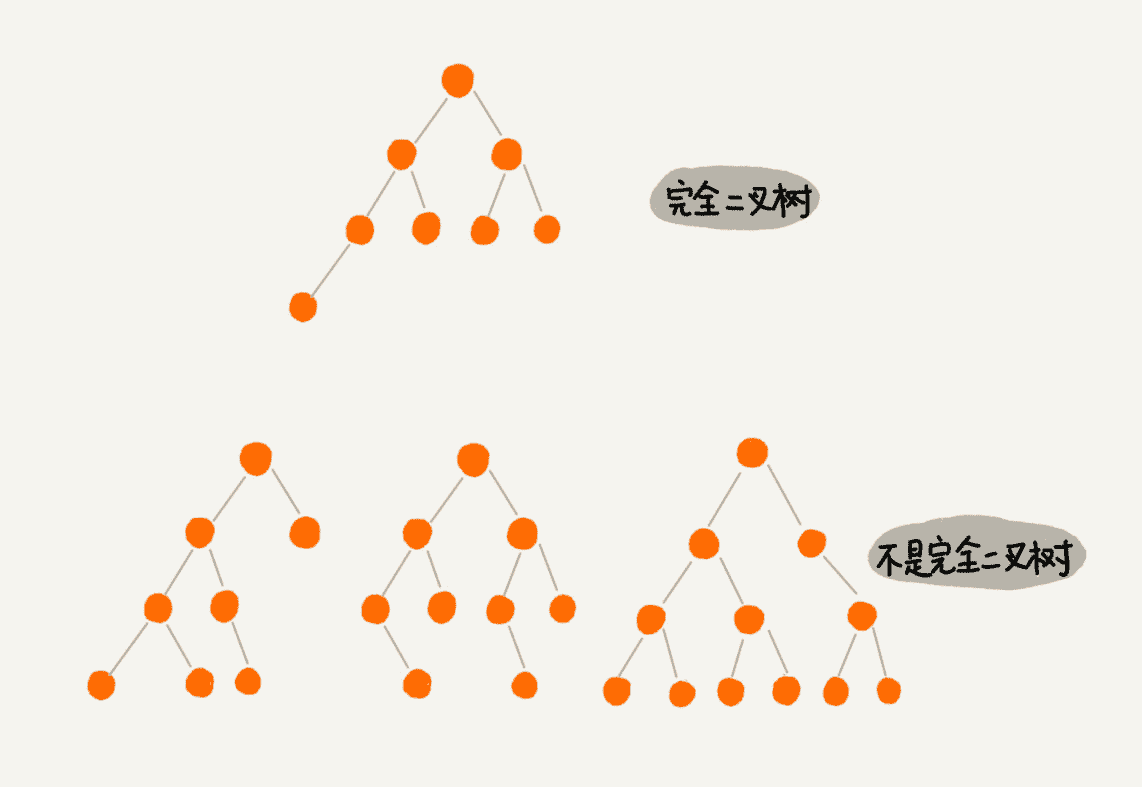
编号 3 的二叉树中,叶子节点都在最底下两层,最后一层的叶子节点都靠左排列,并且除了最后一层,其他层的节点个数都要达到最大,这种二叉树叫作完全二叉树。
如何表示(或者存储)一棵二叉树?
想要存储一棵二叉树,我们有两种方法,一种是基于指针或者引用的二叉链式存储法,一种是基于数组的顺序存储法。
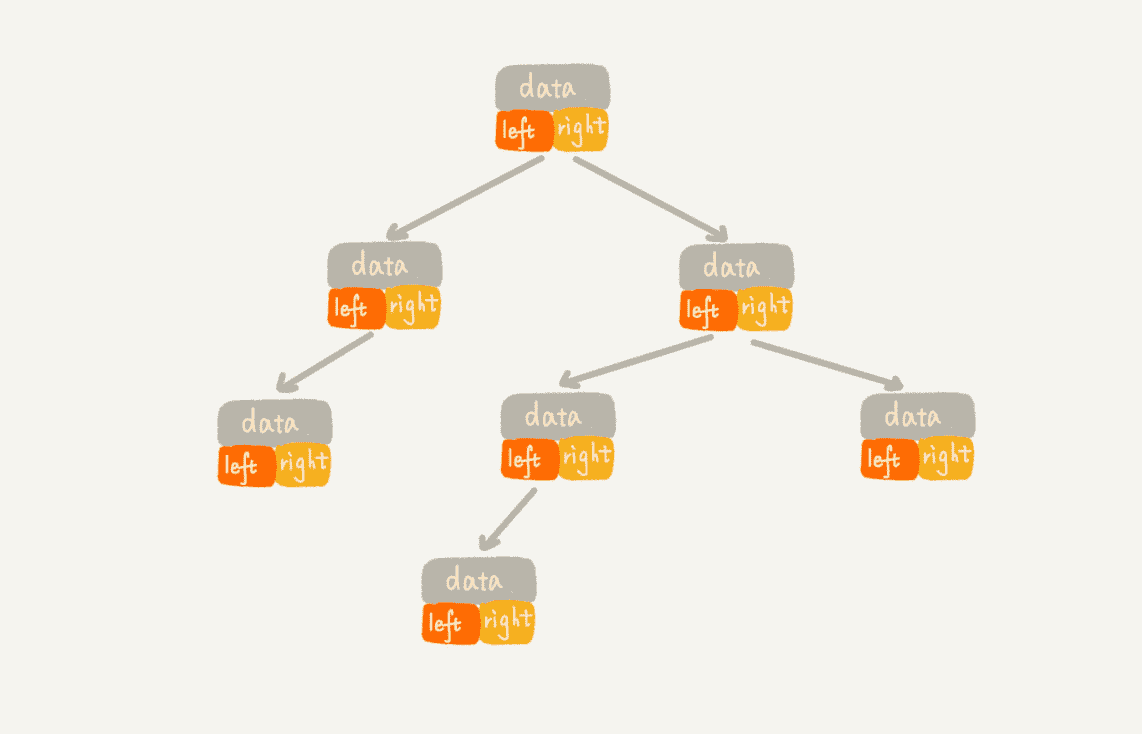
从上图中你应该可以很清楚地看到,每个节点有三个字段,其中一个存储数据,另外两个是指向左右子节点的指针。我们只要拎住根节点,就可以通过左右子节点的指针,把整棵树都串起来。这种存储方式我们比较常用。大部分二叉树代码都是通过这种结构来实现的。
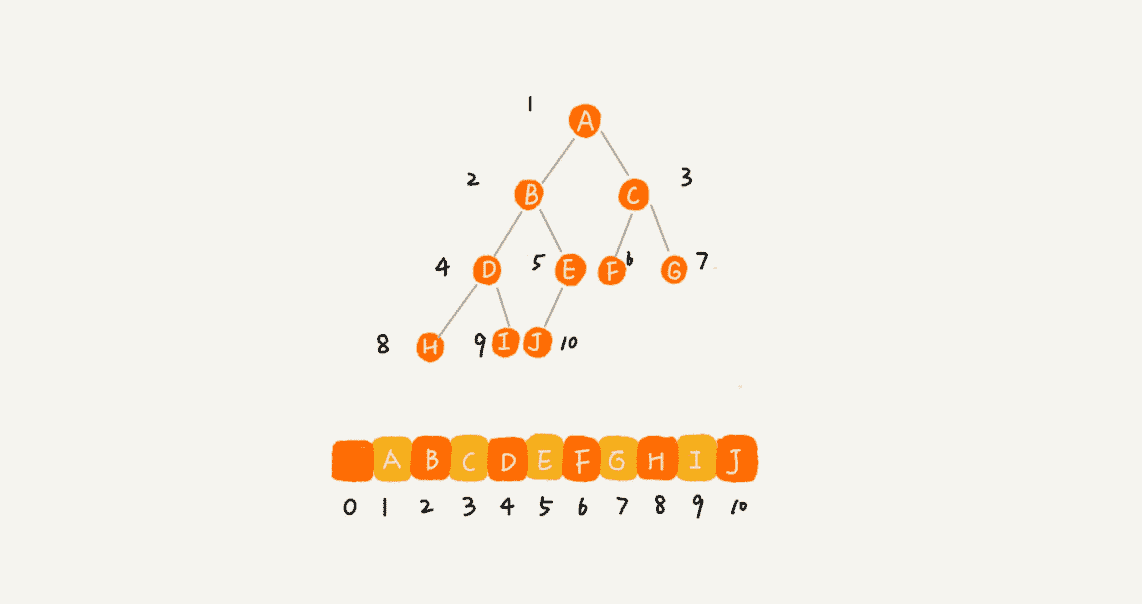
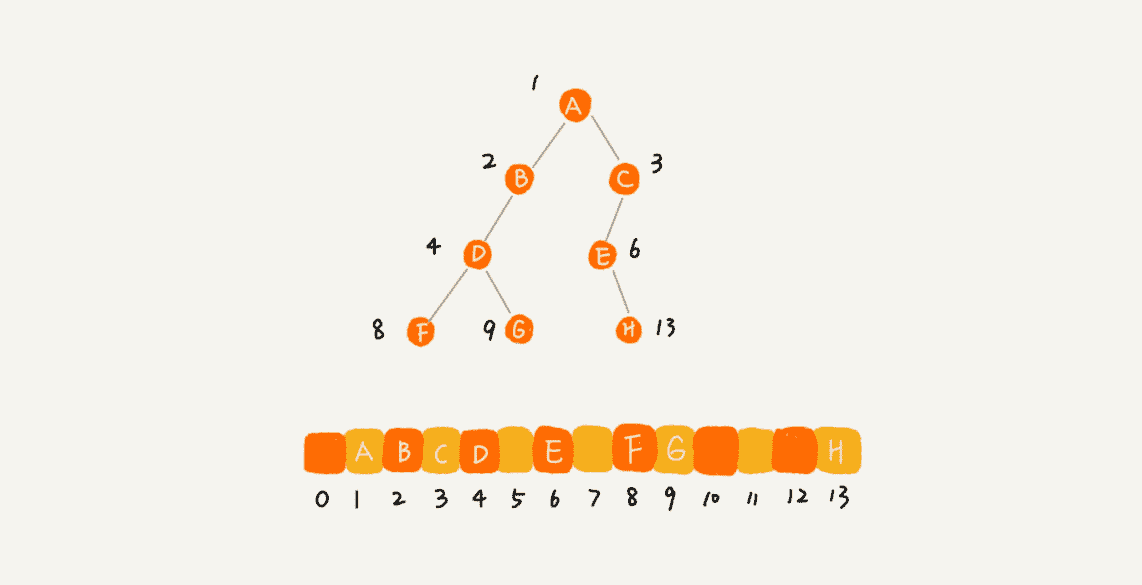
基于数组的顺序存储法。我们把根节点存储在下标 i = 1 的位置,那左子节点存储在下标 2 * i = 2 的位置,右子节点存储在 2 * i + 1 = 3 的位置。以此类推,B 节点的左子节点存储在 2 * i = 2 * 2 = 4 的位置,右子节点存储在 2 * i + 1 = 2 * 2 + 1 = 5 的位置。
如果节点 X 存储在数组中下标为 i 的位置,下标为 2 * i 的位置存储的就是左子节点,下标为 2 * i + 1 的位置存储的就是右子节点。反过来,下标为 i/2 的位置存储就是它的父节点。通过这种方式,我们只要知道根节点存储的位置(一般情况下,为了方便计算子节点,根节点会存储在下标为 1 的位置),这样就可以通过下标计算,把整棵树都串起来。
不过,我刚刚举的例子是一棵完全二叉树,所以仅仅“浪费”了一个下标为 0 的存储位置。如果是非完全二叉树,其实会浪费比较多的数组存储空间。你可以看我举的下面这个例子。
所以,如果某棵二叉树是一棵完全二叉树,那用数组存储无疑是最节省内存的一种方式。因为数组的存储方式并不需要像链式存储法那样,要存储额外的左右子节点的指针。这也是为什么完全二叉树会单独拎出来的原因,也是为什么完全二叉树要求最后一层的子节点都靠左的原因。
二叉树的遍历
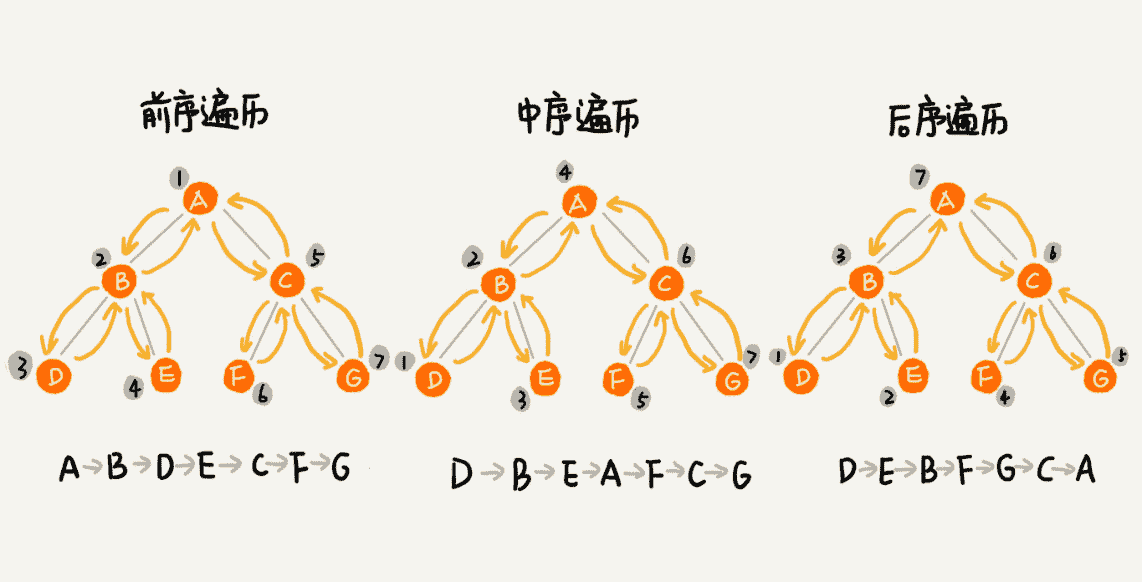
经典的方法有三种,前序遍历、中序遍历和后序遍历。其中,前、中、后序,表示的是节点与它的左右子树节点遍历打印的先后顺序。
前序遍历是指,对于树中的任意节点来说,先打印这个节点,然后再打印它的左子树,最后打印它的右子树。
中序遍历是指,对于树中的任意节点来说,先打印它的左子树,然后再打印它本身,最后打印它的右子树。
后序遍历是指,对于树中的任意节点来说,先打印它的左子树,然后再打印它的右子树,最后打印这个节点本身。
实际上,二叉树的前、中、后序遍历就是一个递归的过程。比如,前序遍历,其实就是先打印根节点,然后再递归地打印左子树,最后递归地打印右子树。
而写递推公式的关键就是,如果要解决问题 A,就假设子问题 B、C 已经解决,然后再来看如何利用 B、C 来解决 A。所以,我们可以把前、中、后序遍历的递推公式都写出来。
前序遍历的递推公式:
preOrder(r) = print r->preOrder(r->left)->preOrder(r->right)
中序遍历的递推公式:
inOrder(r) = inOrder(r->left)->print r->inOrder(r->right)//TODO:CODE
从我前面画的前、中、后序遍历的顺序图,可以看出来,每个节点最多会被访问两次,所以遍历操作的时间复杂度,跟节点的个数 n 成正比,也就是说二叉树遍历的时间复杂度是 O(n)。
二叉查找树 (Binary Search Tree)
二叉查找树是二叉树中最常用的一种类型,也叫二叉搜索树。顾名思义,二叉查找树是为了实现快速查找而生的。不过,它不仅仅支持快速查找一个数据,还支持快速插入、删除一个数据。
二叉查找树要求,在树中的任意一个节点,其左子树中的每个节点的值,都要小于这个节点的值,而右子树节点的值都大于这个节点的值。
- 二叉查找树的查找操作
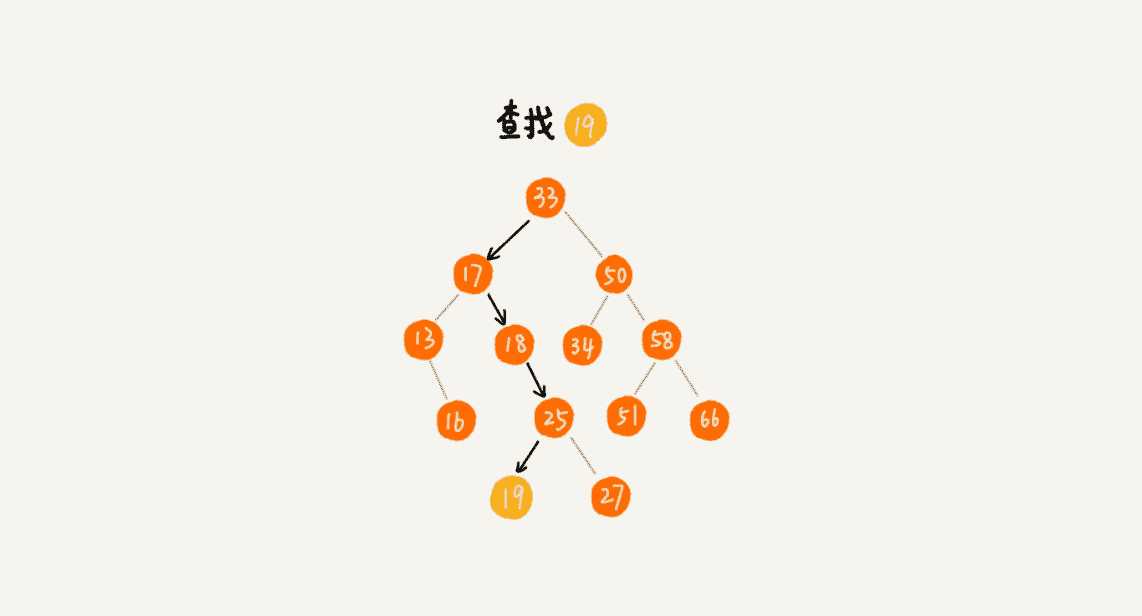
我们先取根节点,如果它等于我们要查找的数据,那就返回。如果要查找的数据比根节点的值小,那就在左子树中递归查找;如果要查找的数据比根节点的值大,那就在右子树中递归查找。
//TODO:CODE
- 二叉查找树的插入操作
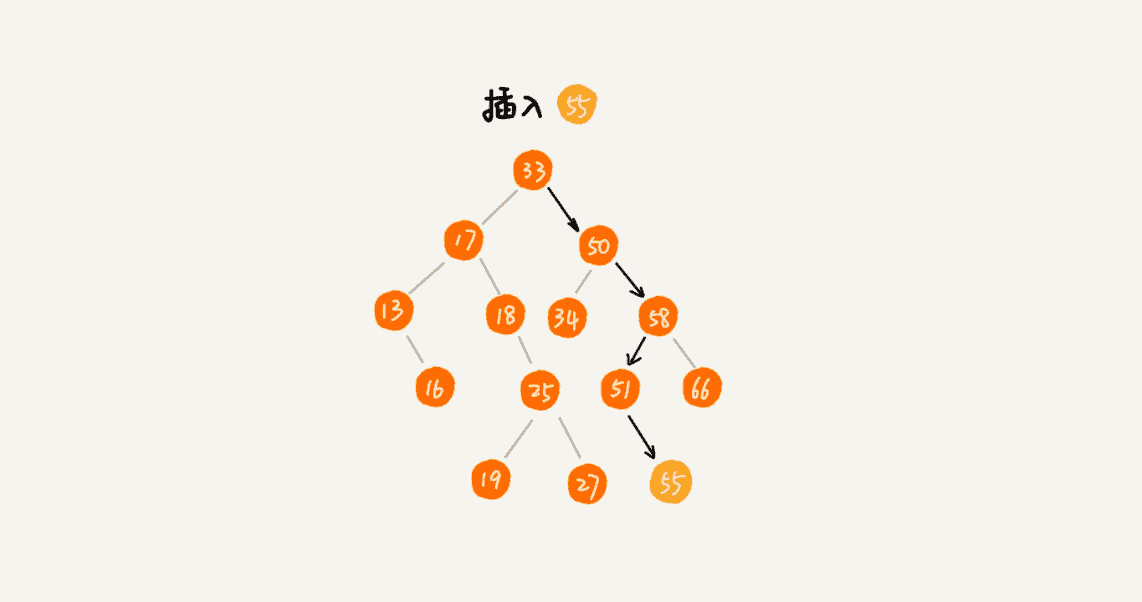
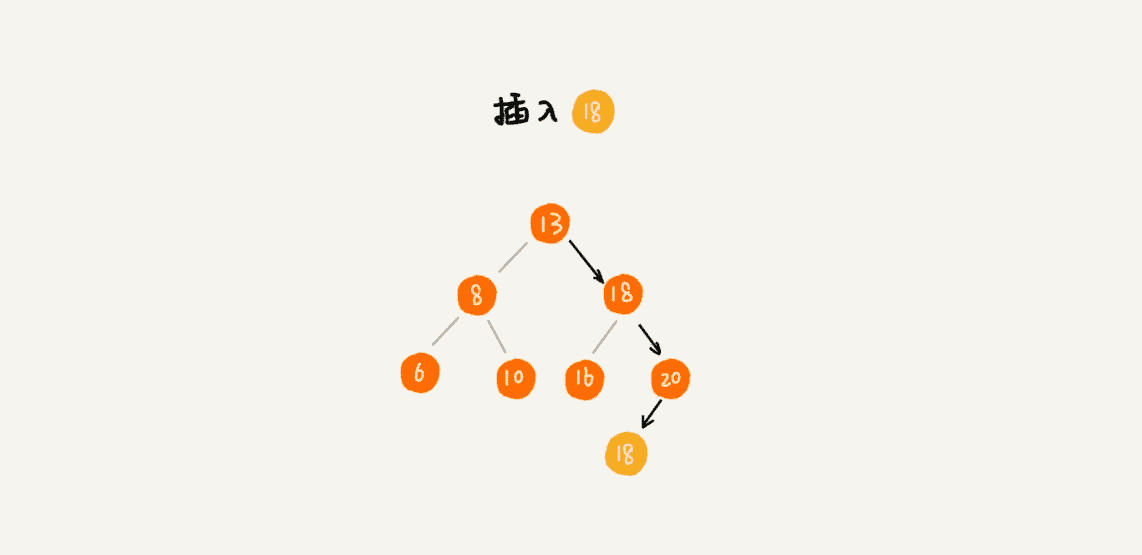
新插入的数据一般都是在叶子节点上,所以我们只需要从根节点开始,依次比较要插入的数据和节点的大小关系。
如果要插入的数据比节点的数据大,并且节点的右子树为空,就将新数据直接插到右子节点的位置;如果不为空,就再递归遍历右子树,查找插入位置。同理,如果要插入的数据比节点数值小,并且节点的左子树为空,就将新数据插入到左子节点的位置;如果不为空,就再递归遍历左子树,查找插入位置。
//TODO:CODE
- 二叉查找树的删除操作
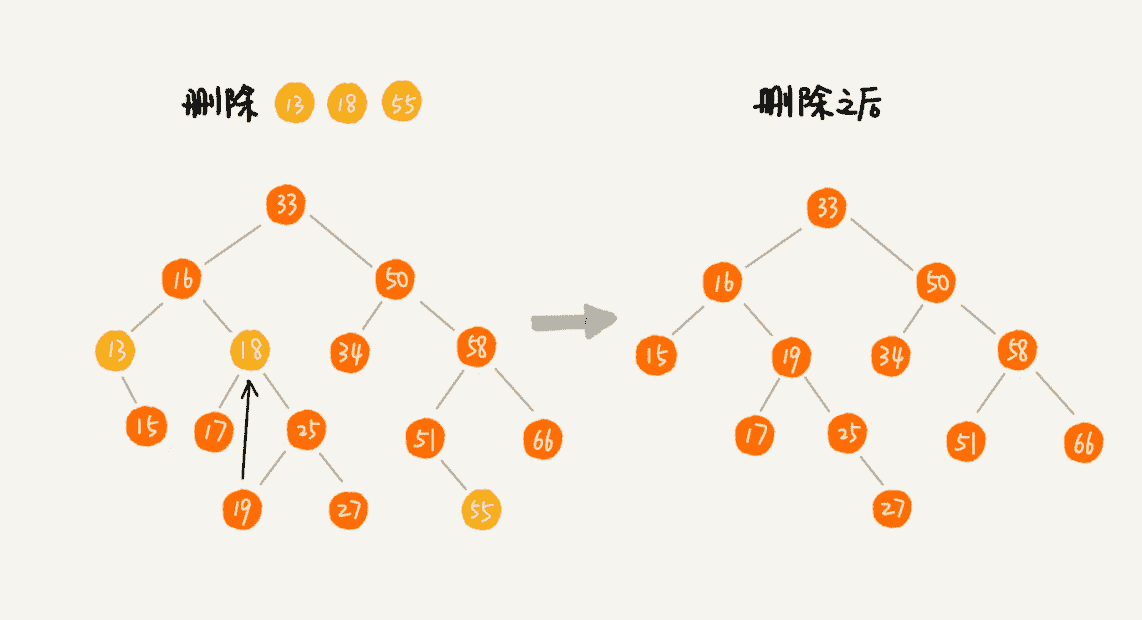
- 第一种情况是,如果要删除的节点没有子节点,我们只需要直接将父节点中,指向要删除节点的指针置为 null。比如下图中的删除节点 55。
- 第二种情况是,如果要删除的节点只有一个子节点(只有左子节点或者右子节点),我们只需要更新父节点中,指向要删除节点的指针,让它指向要删除节点的子节点就可以了。比如图中的删除节点 13。
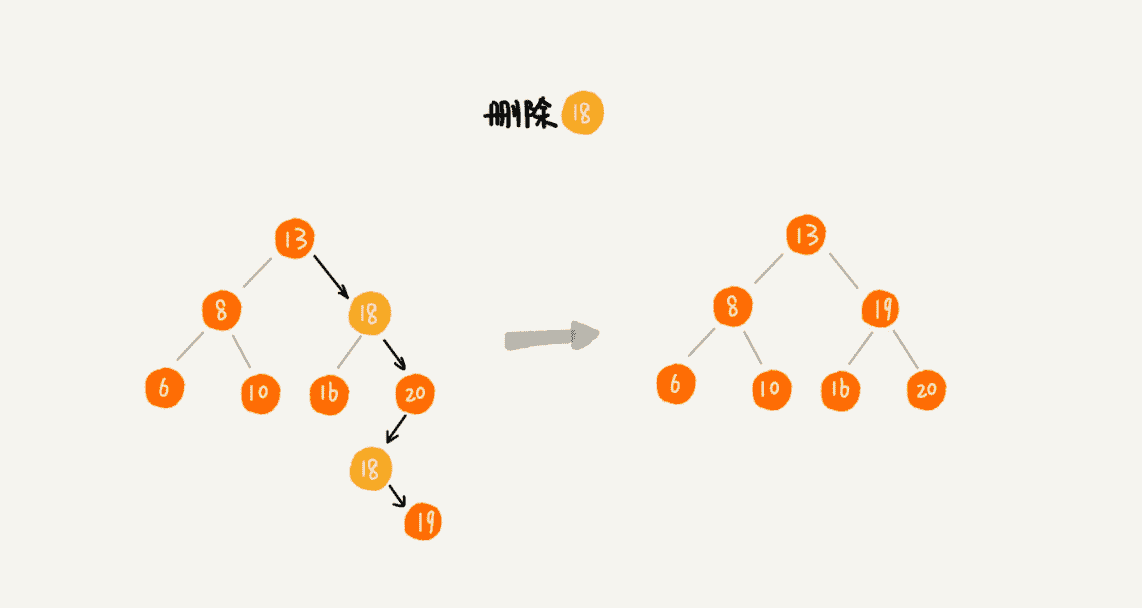
- 第三种情况是,如果要删除的节点有两个子节点,这就比较复杂了。我们需要找到这个节点的右子树中的最小节点,把它替换到要删除的节点上。然后再删除掉这个最小节点,因为最小节点肯定没有左子节点(如果有左子结点,那就不是最小节点了),所以,我们可以应用上面两条规则来删除这个最小节点。比如图中的删除节点 18。
//TODO:CODE
实际上,关于二叉查找树的删除操作,还有个非常简单、取巧的方法,就是单纯将要删除的节点标记为“已删除”,但是并不真正从树中将这个节点去掉。这样原本删除的节点还需要存储在内存中,比较浪费内存空间,但是删除操作就变得简单了很多。而且,这种处理方法也并没有增加插入、查找操作代码实现的难度。
- 二叉查找树的其他操作
二叉查找树中还可以支持快速地查找最大节点和最小节点、前驱节点和后继节点。中序遍历二叉查找树,可以输出有序的数据序列,时间复杂度是 O(n),非常高效。因此,二叉查找树也叫作二叉排序树。
//TODO:CODE
支持重复数据的二叉查找树
前面讲二叉查找树的时候,我们默认树中节点存储的都是数字。很多时候,在实际的软件开发中,我们在二叉查找树中存储的,是一个包含很多字段的对象。我们利用对象的某个字段作为键值(key)来构建二叉查找树。我们把对象中的其他字段叫作卫星数据。
前面我们讲的二叉查找树的操作,针对的都是不存在键值相同的情况。那如果存储的两个对象键值相同,这种情况该怎么处理呢?
- 二叉查找树中每一个节点不仅会存储一个数据,因此我们通过链表和支持动态扩容的数组等数据结构,把值相同的数据都存储在同一个节点上。
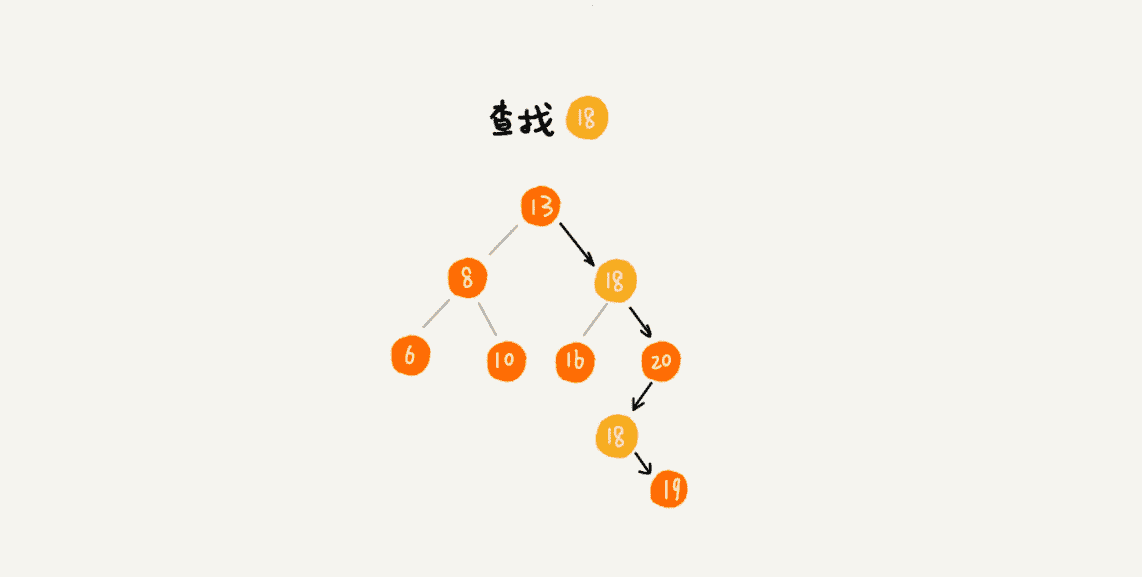
- 每个节点仍然只存储一个数据。在查找插入位置的过程中,如果碰到一个节点的值,与要插入数据的值相同,我们就将这个要插入的数据放到这个节点的右子树,也就是说,把这个新插入的数据当作大于这个节点的值来处理。
当要查找数据的时候,遇到值相同的节点,我们并不停止查找操作,而是继续在右子树中查找,直到遇到叶子节点,才停止。这样就可以把键值等于要查找值的所有节点都找出来。
对于删除操作,我们也需要先查找到每个要删除的节点,然后再按前面讲的删除操作的方法,依次删除。
二叉查找树的时间复杂度分析
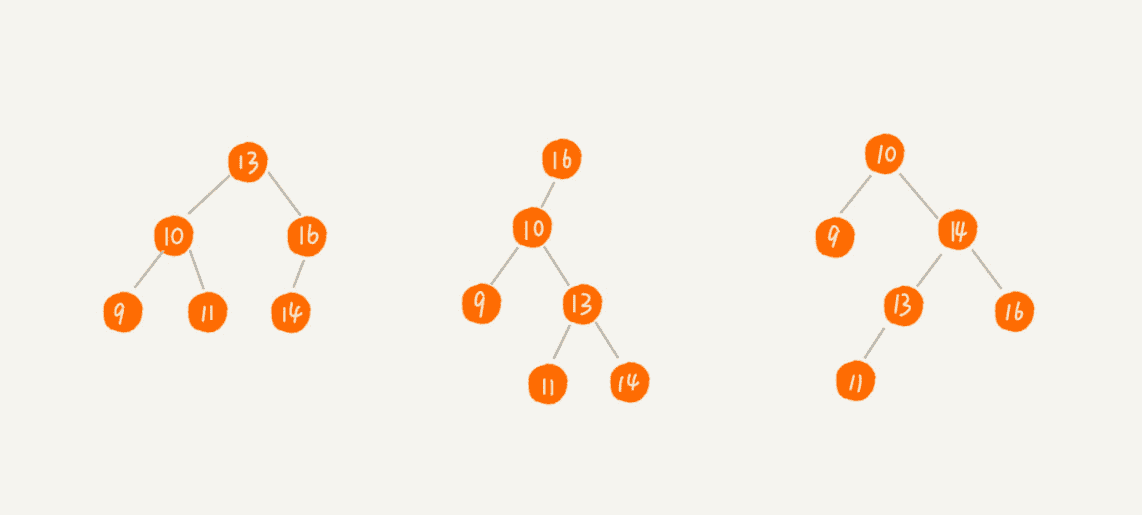
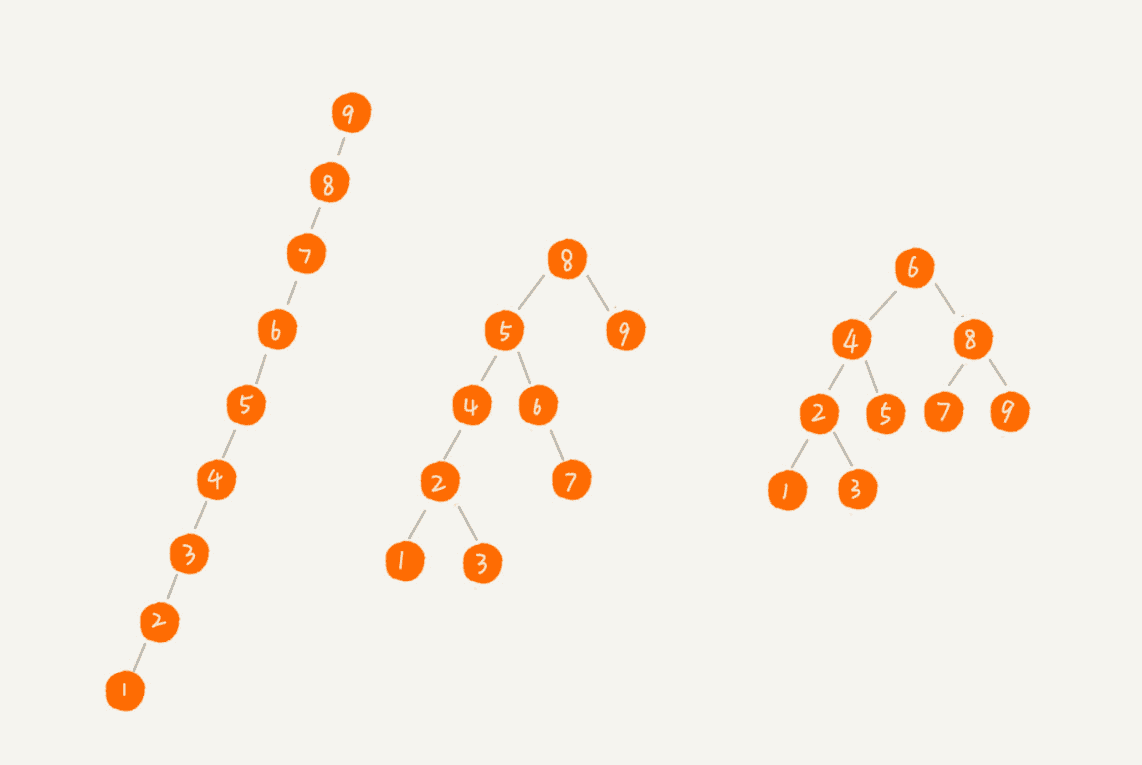
实际上,二叉查找树的形态各式各样。比如下图中,对于同一组数据,我们构造了三种二叉查找树。它们的查找、插入、删除操作的执行效率都是不一样的。图中第一种二叉查找树,根节点的左右子树极度不平衡,已经退化成了链表,所以查找的时间复杂度就变成了 O(n)。
我们现在来分析一个最理想的情况,二叉查找树是一棵完全二叉树(或满二叉树)。这个时候,插入、删除、查找的时间复杂度是多少呢?
时间复杂度其实都跟树的高度成正比,也就是 O(height)。既然这样,现在问题就转变成另外一个了,也就是,如何求一棵包含 n 个节点的完全二叉树的高度?
树的高度就等于最大层数减一,为了方便计算,我们转换成层来表示。包含 n 个节点的完全二叉树中,第一层包含 1 个节点,第二层包含 2 个节点,第三层包含 4 个节点,依次类推,下面一层节点个数是上一层的 2 倍,第 K 层包含的节点个数就是 $2^(K-1)$。
不过,对于完全二叉树来说,最后一层的节点个数有点儿不遵守上面的规律了。它包含的节点个数在 1 个到 $2^(L-1)$ 个之间(我们假设最大层数是 L)。如果我们把每一层的节点个数加起来就是总的节点个数 n。也就是说,如果节点的个数是 n,那么 n 满足这样一个关系:
n >= 1+2+4+8+...+2^(L-2)+1
n <= 1+2+4+8+...+2^(L-2)+2^(L-1)L 的范围是 [ $\log_2 (n+1)$, $\log_2 n +1$ ]。完全二叉树的层数小于等于 $\log_2 n +1$。也就是说,完全二叉树的高度小于等于 $\log_2 n$。
显然,极度不平衡的二叉查找树,它的查找性能肯定不能满足我们的需求。我们需要构建一种不管怎么删除、插入数据,在任何时候,都能保持任意节点左右子树都比较平衡的二叉查找树。
思考
散列表的插入、删除、查找操作的时间复杂度可以做到常量级的 O(1),非常高效。而二叉查找树在比较平衡的情况下,插入、删除、查找操作时间复杂度才是 O(logn),相对散列表,好像并没有什么优势,那我们为什么还要用二叉查找树呢?
- 第一,散列表中的数据是无序存储的,如果要输出有序的数据,需要先进行排序。而对于二叉查找树来说,我们只需要中序遍历,就可以在 O(n) 的时间复杂度内,输出有序的数据序列。
- 第二,散列表扩容耗时很多,而且当遇到散列冲突时,性能不稳定,尽管二叉查找树的性能不稳定,但是在工程中,我们最常用的平衡二叉查找树的性能非常稳定,时间复杂度稳定在 O(logn)。
- 第三,笼统地来说,尽管散列表的查找等操作的时间复杂度是常量级的,但因为哈希冲突的存在,这个常量不一定比 logn 小,所以实际的查找速度可能不一定比 O(logn) 快。加上哈希函数的耗时,也不一定就比平衡二叉查找树的效率高。
- 第四,散列表的构造比二叉查找树要复杂,需要考虑的东西很多。比如散列函数的设计、冲突解决办法、扩容、缩容等。平衡二叉查找树只需要考虑平衡性这一个问题,而且这个问题的解决方案比较成熟、固定。最后,为了避免过多的散列冲突,散列表装载因子不能太大,特别是基于开放寻址法解决冲突的散列表,不然会浪费一定的存储空间。