堆和堆排序
堆排序是一种原地的、时间复杂度为$O(n\log n)$的排序算法。
堆
堆是一种特殊的树。
- 堆是一个完全二叉树;
- 堆中每一个节点的值都必须大于等于(或小于等于)其子树中每个节点的值。
堆中每个节点的值都大于等于(或者小于等于)其左右子节点的值。
对于每个节点的值都大于等于子树中每个节点值的堆,我们叫作“大顶堆”。对于每个节点的值都小于等于子树中每个节点值的堆,我们叫作“小顶堆”。
如何实现一个堆
完全二叉树比较适合用数组来存储。用数组来存储完全二叉树是非常节省存储空间的。因为我们不需要存储左右子节点的指针,单纯地通过数组的下标,就可以找到一个节点的左右子节点和父节点。
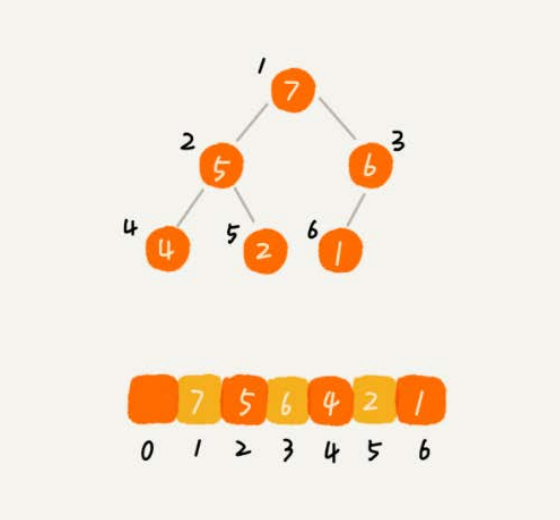
从图中我们可以看到,数组中下标为$i$的节点的左子节点,就是下标为$i*2$的节点,右子节点就是下标为$i*2+1$的节点,父节点就是下标为$\frac{i}{2}$的节点。
如果没有特殊说明,下面都是拿大顶堆来讲解。
- 往堆中插入一个元素
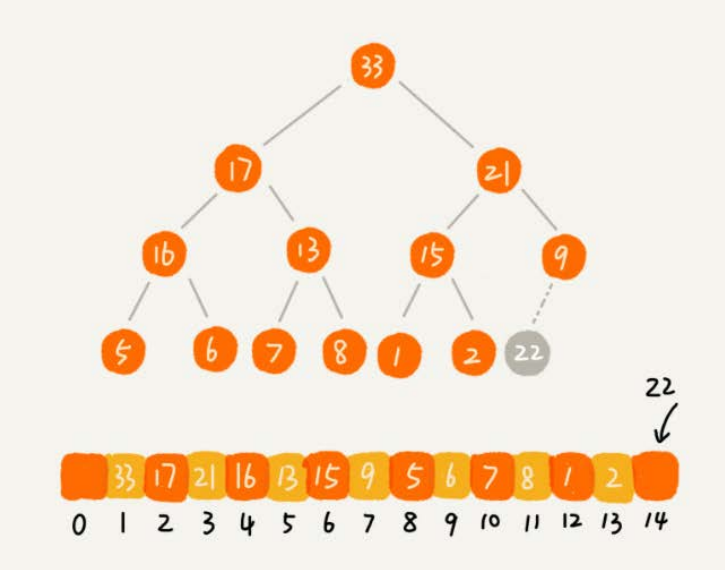
如果我们把新插入的元素放到堆的最后,如下图,是不是不符合堆的特性了?于是,我们就需要进行调整,让其重新满足堆的特性,这个过程我们起了一个名字,就叫作堆化(heapify)。
堆化实际上有两种,从下往上和从上往下。这里我先讲从下往上的堆化方法。
堆化非常简单,就是顺着节点所在的路径,向上或者向下,对比,然后交换。
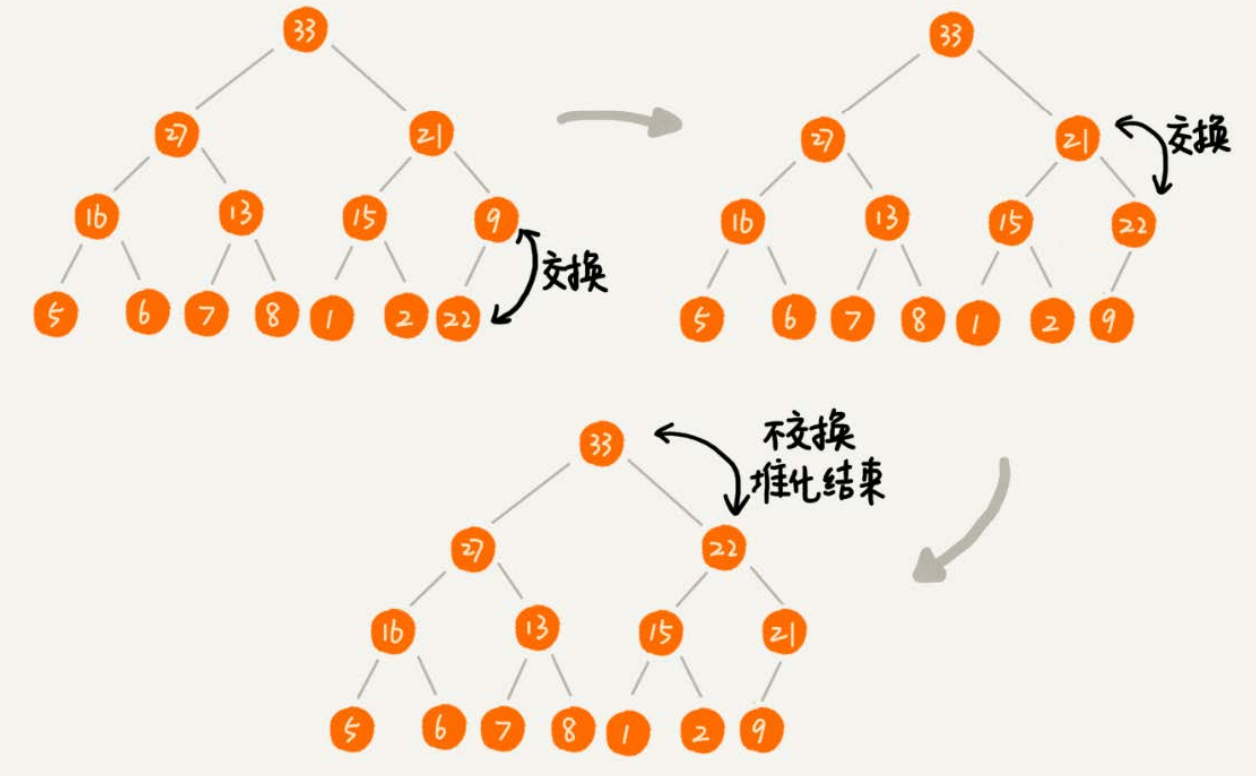
我们可以让新插入的节点与父节点对比大小。如果不满足子节点小于等于父节点的大小关系,我们就互换两个节点。一直重复这个过程,直到父子节点之间满足刚说的那种大小关系。
//TODO:CODE
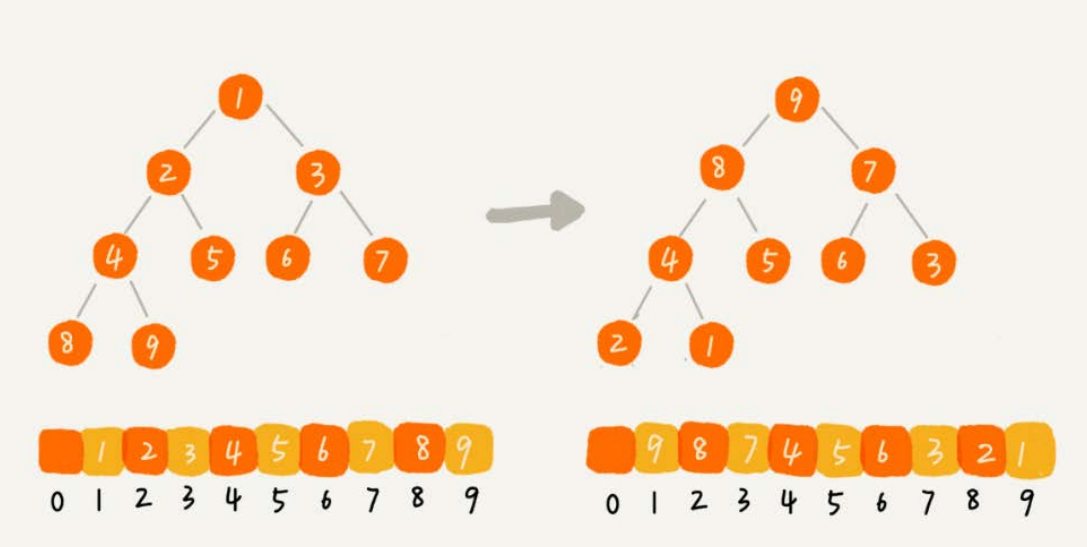
- 删除堆顶元素
任何节点的值都大于等于(或小于等于)子树节点的值,我们可以发现,堆顶元素存储的就是堆中数据的最大值或者最小值。
假设我们构造的是大顶堆,堆顶元素就是最大的元素。当我们删除堆顶元素之后,就需要把第二大的元素放到堆顶,那第二大元素肯定会出现在左右子节点中。然后我们再迭代地删除第二大节点,以此类推,直到叶子节点被删除。
不过这种方法有点问题,就是最后堆化出来的堆并不满足完全二叉树的特性。
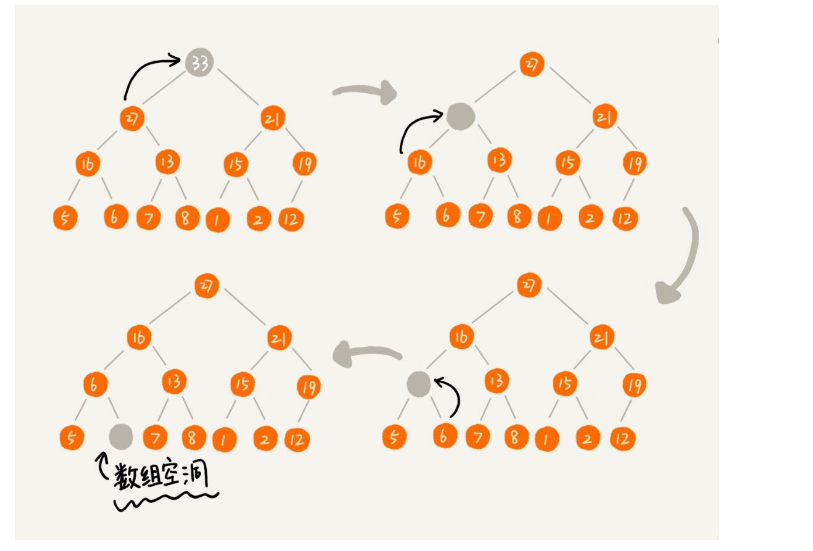
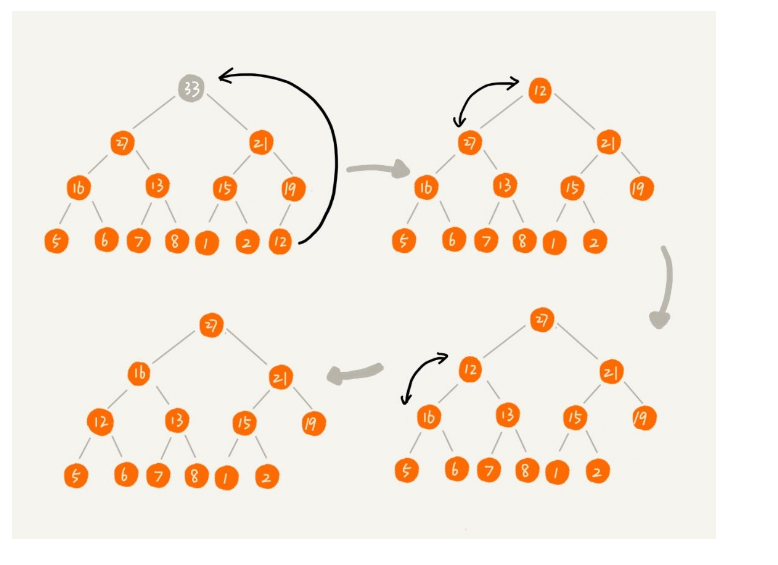
实际上,我们稍微改变一下思路,就可以解决这个问题。如下图。我们把最后一个节点放到堆顶,然后利用同样的父子节点对比方法。对于不满足父子节点大小关系的,互换两个节点,并且重复进行这个过程,直到父子节点之间满足大小关系为止。这就是从上往下的堆化方法。
因为我们移除的是数组中的最后一个元素,而在堆化的过程中,都是交换操作,不会出现数组中的“空洞”,所以这种方法堆化之后的结果,肯定满足完全二叉树的特性。
//TODO:CODE
一个包含$n$个节点的完全二叉树,树的高度不会超过$\log_{2}n$。堆化的过程是顺着节点所在路径比较交换的,所以堆化的时间复杂度跟树的高度成正比,也就是$O(\log n)$。插入数据和删除堆顶元素的主要逻辑就是堆化,所以,往堆中插入一个元素和删除堆顶元素的时间复杂度都是$O(\log n)$。
堆排序
建堆
首先将数组原地建成一个堆。所谓“原地”就是,不借助另一个数组,就在原数组上操作。建堆的过程,有两种思路。
第一种是借助我们前面讲的,在堆中插入一个元素的思路。尽管数组中包含$n$个数据,但是我们可以假设,起初堆中只包含一个数据,就是下标为$1$的数据。然后,我们调用前面讲的插入操作,将下标从$2$到$n$的数据依次插入到堆中。这样我们就将包含$n$个数据的数组,组织成了堆。
第二种实现思路,跟第一种截然相反。第一种建堆思路的处理过程是从前往后处理数组数据,并且每个数据插入堆中时,都是从下往上堆化。而第二种实现思路,是从后往前处理数组,并且每个数据都是从上往下堆化。
下图是第二种实现思路的建堆分解步骤图。因为叶子节点往下堆化只能自己跟自己比较,所以我们直接从第一个非叶子节点开始,依次堆化就行了。
//TODO:CODE
在这段代码中,我们对下标从$\frac{n}{2}$ 开始到$1$的数据进行堆化,下标是$\frac{n}{2}+1$到$n$的节点是叶子节点,我们不需要堆化。实际上,对于完全二叉树来说,下标从$\frac{n}{2}+1$到$n$的节点都是叶子节点。
每个节点堆化的时间复杂度是$O(\log n)$,那$\frac{n}{2}+1$个节点堆化的总时间复杂度是不是就是$O(n\log n)$呢?这个答案虽然也没错,但是这个值还是不够精确。实际上,堆排序的建堆过程的时间复杂度是$O(n)$。
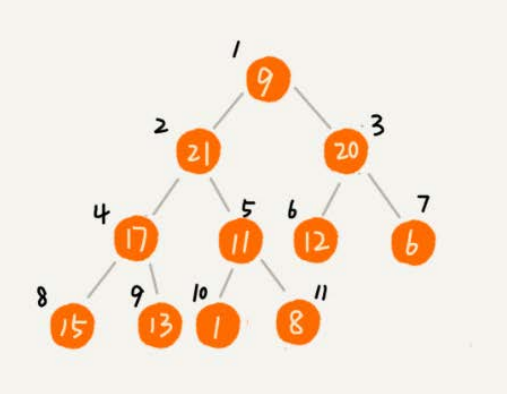
因为叶子节点不需要堆化,所以需要堆化的节点从倒数第二层开始。每个节点堆化的过程中,需要比较和交换的节点个数,跟这个节点的高度$k$成正比。
我把每一层的节点个数和对应的高度画了出来。我们只需要将每个节点的高度求和,得出的就是建堆的时间复杂度。
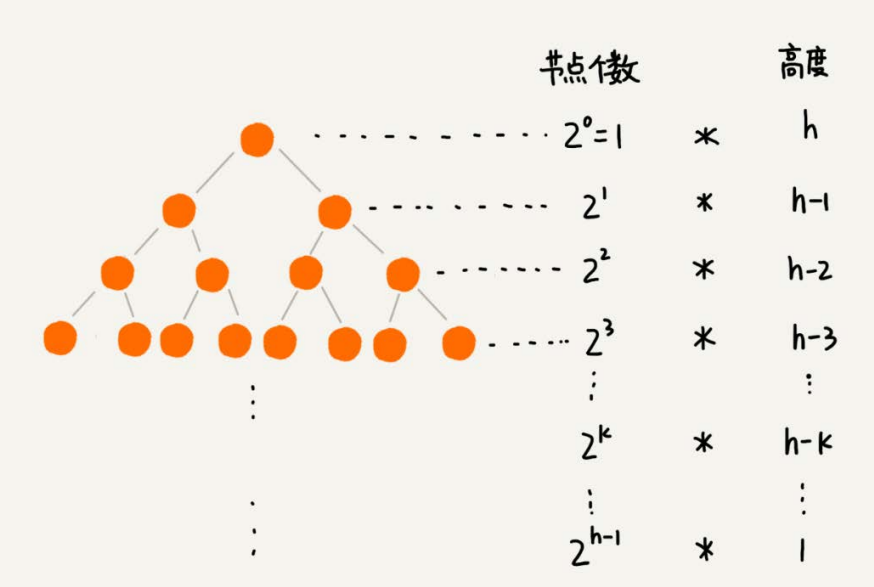
我们将每个非叶子节点的高度求和,就是下面这个公式:

把公式左右都乘以$2$,就得到另一个公式$S2$。我们将$S2$错位对齐,并且用$S2$减去$S1$,可以得到$S$。
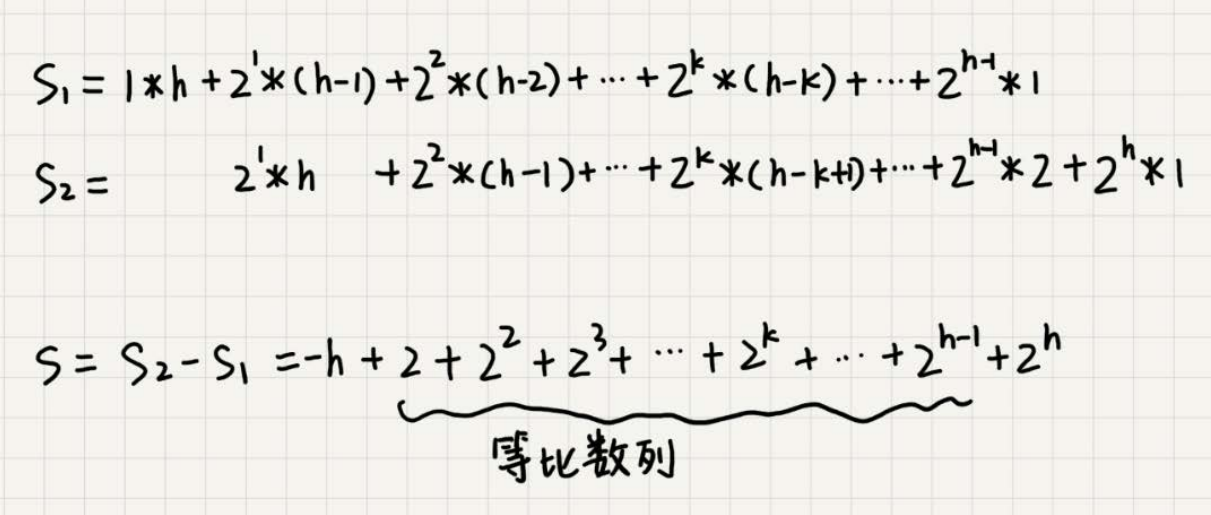
$S$的中间部分是一个等比数列,所以最后可以用等比数列的求和公式来计算,最终的结果就是下面图中画的这个样子。
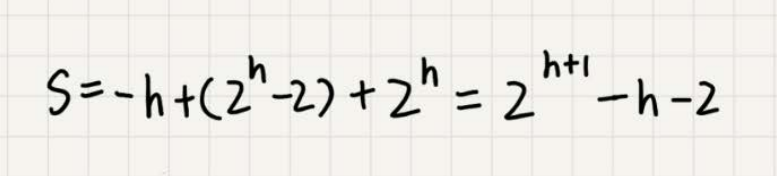
因为$h=\log_{2}n$,代入公式$S$,就能得到$S=O(n)$,所以,建堆的时间复杂度就是$O(n)$。
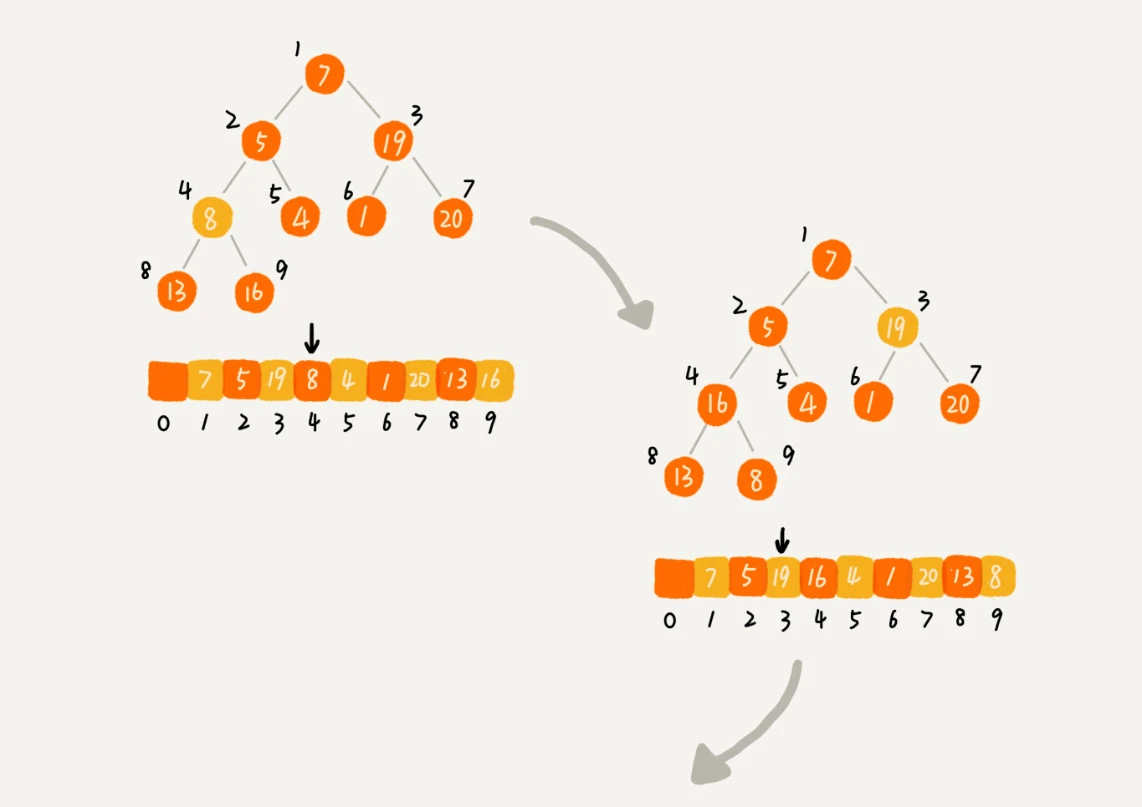
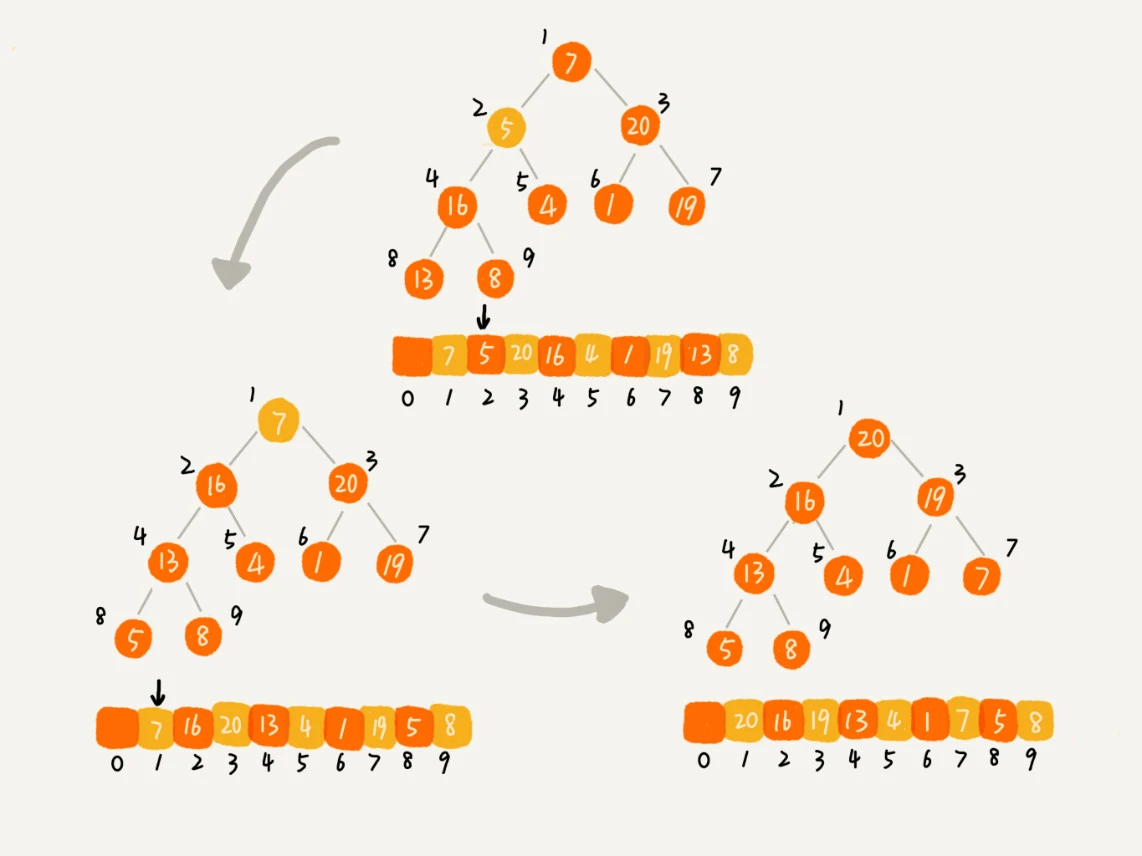
排序
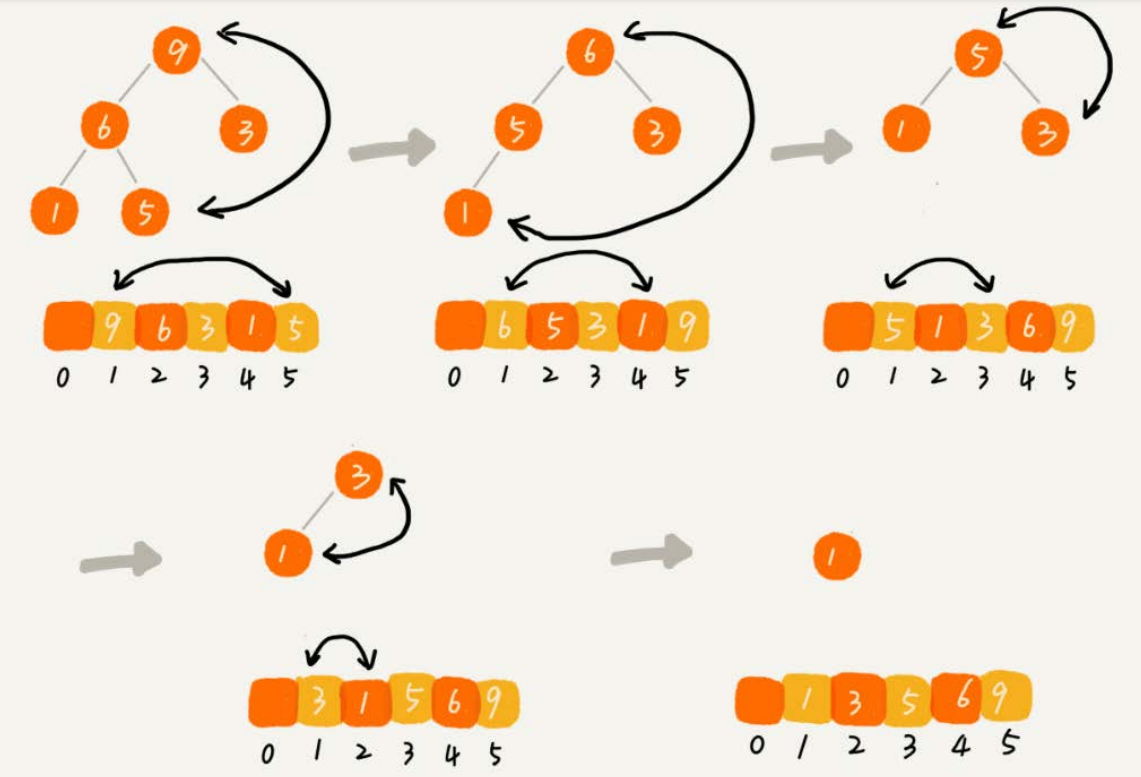
建堆结束之后,数组中的数据已经是按照大顶堆的特性来组织的。数组中的第一个元素就是堆顶,也就是最大的元素。我们把它跟最后一个元素交换,那最大元素就放到了下标为$n$的位置。
这个过程有点类似上面讲的“删除堆顶元素”的操作,当堆顶元素移除之后,我们把下标为$n$的元素放到堆顶,然后再通过堆化的方法,将剩下的$n-1$个元素重新构建成堆。堆化完成之后,我们再取堆顶的元素,放到下标是$n-1$的位置,一直重复这个过程,直到最后堆中只剩下标为$1$的一个元素,排序工作就完成了。
//TODO:CODE
整个堆排序的过程,都只需要极个别临时存储空间,所以堆排序是原地排序算法。堆排序包括建堆和排序两个操作,建堆过程的时间复杂度是$O(n)$,排序过程的时间复杂度是$O(n\log n)$,所以,堆排序整体的时间复杂度是$O(n\log n)$。
堆排序不是稳定的排序算法,因为在排序的过程,存在将堆的最后一个节点跟堆顶节点互换的操作,所以就有可能改变值相同数据的原始相对顺序。
在前面的讲解以及代码中,我都假设,堆中的数据是从数组下标为1的位置开始存储。那如果从$0$开始存储,实际上处理思路是没有任何变化的,唯一变化的,可能就是,代码实现的时候,计算子节点和父节点的下标的公式改变了。
如果节点的下标是$i$,那左子节点的下标就是$2*i+1$,右子节点的下标就是$2*i+2$,父节点的下标就是$\frac{i-1}{2}$。
思考
在实际开发中,为什么快速排序要比堆排序性能好?
第一点,堆排序数据访问的方式没有快速排序友好。
对于快速排序来说,数据是顺序访问的。而对于堆排序来说,数据是跳着访问的。 比如,堆排序中,最重要的一个操作就是数据的堆化。比如下面这个例子,对堆顶节点进行堆化,会依次访问数组下标是$1,2,4,8$的元素,而不是像快速排序那样,局部顺序访问,所以,这样对CPU缓存是不友好的。
第二点,对于同样的数据,在排序过程中,堆排序算法的数据交换次数要多于快速排序。
对于基于比较的排序算法来说,整个排序过程就是由两个基本的操作组成的,比较和交换(或移动)。快速排序数据交换的次数不会比逆序度多。
但是堆排序的第一步是建堆,建堆的过程会打乱数据原有的相对先后顺序,导致原数据的有序度降低。比如,对于一组已经有序的数据来说,经过建堆之后,数据反而变得更无序了。
堆的应用
优先级队列
优先级队列,顾名思义,它首先应该是一个队列。队列最大的特性就是先进先出。不过,在优先级队列中,数据的出队顺序不是先进先出,而是按照优先级来,优先级最高的,最先出队。
一个堆就可以看作一个优先级队列。很多时候,它们只是概念上的区分而已。往优先级队列中插入一个元素,就相当于往堆中插入一个元素;从优先级队列中取出优先级最高的元素,就相当于取出堆顶元素。
- 合并有序小文件
假设我们有100个小文件,每个文件的大小是100MB,每个文件中存储的都是有序的字符串。我们希望将这些100个小文件合并成一个有序的大文件。这里就会用到优先级队列。
我们从这100个文件中,各取第一个字符串,放入数组中,然后比较大小,把最小的那个字符串放入合并后的大文件中,并从数组中删除。
假设,这个最小的字符串来自于13.txt这个小文件,我们就再从这个小文件取下一个字符串,并且放到数组中,重新比较大小,并且选择最小的放入合并后的大文件,并且将它从数组中删除。依次类推,直到所有的文件中的数据都放入到大文件为止。
这里我们用数组这种数据结构,来存储从小文件中取出来的字符串。每次从数组中取最小字符串,都需要循环遍历整个数组,显然,这不是很高效。有没有更加高效方法呢?
这里就可以用到优先级队列,也可以说是堆。我们将从小文件中取出来的字符串放入到小顶堆中,那堆顶的元素,也就是优先级队列队首的元素,就是最小的字符串。我们将这个字符串放入到大文件中,并将其从堆中删除。然后再从小文件中取出下一个字符串,放入到堆中。循环这个过程,就可以将100个小文件中的数据依次放入到大文件中。
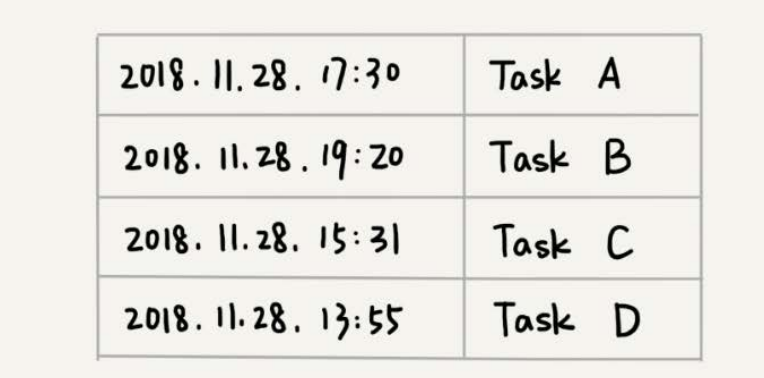
- 高性能定时器
假设我们有一个定时器,定时器中维护了很多定时任务,每个任务都设定了一个要触发执行的时间点。定时器每过一个很小的单位时间(比如1秒),就扫描一遍任务,看是否有任务到达设定的执行时间。如果到达了,就拿出来执行。
但是,这样每过1秒就扫描一遍任务列表的做法比较低效,主要原因有两点:第一,任务的约定执行时间离当前时间可能还有很久,这样前面很多次扫描其实都是徒劳的;第二,每次都要扫描整个任务列表,如果任务列表很大的话,势必会比较耗时。
针对这些问题,我们就可以用优先级队列来解决。我们按照任务设定的执行时间,将这些任务存储在优先级队列中,队列首部(也就是小顶堆的堆顶)存储的是最先执行的任务。
这样,定时器就不需要每隔1秒就扫描一遍任务列表了。它拿队首任务的执行时间点,与当前时间点相减,得到一个时间间隔T。
这个时间间隔T就是,从当前时间开始,需要等待多久,才会有第一个任务需要被执行。这样,定时器就可以设定在T秒之后,再来执行任务。从当前时间点到(T-1)秒这段时间里,定时器都不需要做任何事情。
当T秒时间过去之后,定时器取优先级队列中队首的任务执行。然后再计算新的队首任务的执行时间点与当前时间点的差值,把这个值作为定时器执行下一个任务需要等待的时间。
利用堆求 Top K
可以把这种求Top K的问题抽象成两类。一类是针对静态数据集合,也就是说数据集合事先确定,不会再变。另一类是针对动态数据集合,也就是说数据集合事先并不确定,有数据动态地加入到集合中。
针对静态数据,如何在一个包含n个数据的数组中,查找前K大数据呢?我们可以维护一个大小为K的小顶堆,顺序遍历数组,从数组中取出取数据与堆顶元素比较。如果比堆顶元素大,我们就把堆顶元素删除,并且将这个元素插入到堆中;如果比堆顶元素小,则不做处理,继续遍历数组。这样等数组中的数据都遍历完之后,堆中的数据就是前K大数据了。
遍历数组需要O(n)的时间复杂度,一次堆化操作需要O(logK)的时间复杂度,所以最坏情况下,n个元素都入堆一次,所以时间复杂度就是O(nlogK)。
针对动态数据求得Top K就是实时Top K。怎么理解呢?我举一个例子。一个数据集合中有两个操作,一个是添加数据,另一个询问当前的前K大数据。
如果每次询问前K大数据,我们都基于当前的数据重新计算的话,那时间复杂度就是O(nlogK),n表示当前的数据的大小。实际上,我们可以一直都维护一个K大小的小顶堆,当有数据被添加到集合中时,我们就拿它与堆顶的元素对比。如果比堆顶元素大,我们就把堆顶元素删除,并且将这个元素插入到堆中;如果比堆顶元素小,则不做处理。这样,无论任何时候需要查询当前的前K大数据,我们都可以里立刻返回给他。
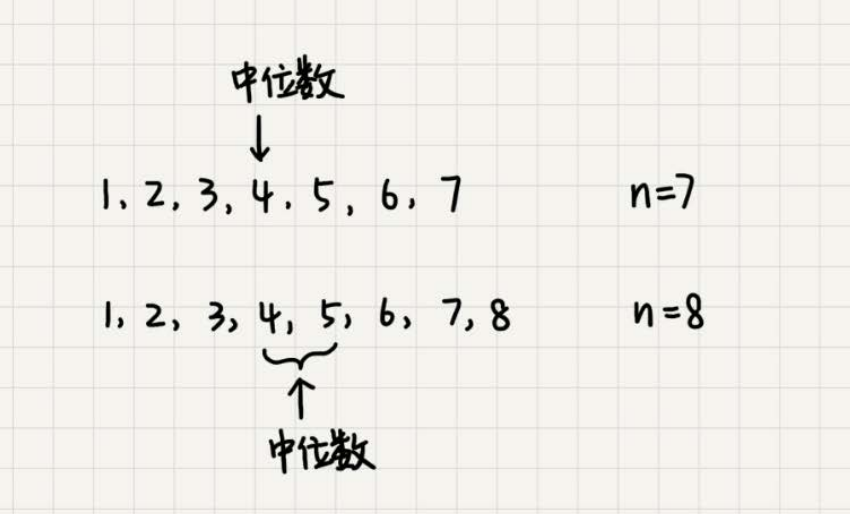
利用堆求中位数
中位数,顾名思义,就是处在中间位置的那个数。如果数据的个数是奇数,把数据从小到大排列,那第$\frac{n}{2}+1$个数据就是中位数;如果数据的个数是偶数的话,那处于中间位置的数据有两个,第$\frac{n}{2}$个和第$\frac{n}{2}+1$个数据,这个时候,我们可以随意取一个作为中位数,比如取两个数中靠前的那个,就是第$\frac{n}{2}$个数据。
对于一组静态数据,中位数是固定的,我们可以先排序,第$\frac{n}{2}$个数据就是中位数。每次询问中位数的时候,我们直接返回这个固定的值就好了。所以,尽管排序的代价比较大,但是边际成本会很小。但是,如果我们面对的是动态数据集合,中位数在不停地变动,如果再用先排序的方法,每次询问中位数的时候,都要先进行排序,那效率就不高了。
借助堆这种数据结构,我们不用排序,就可以非常高效地实现求中位数操作。
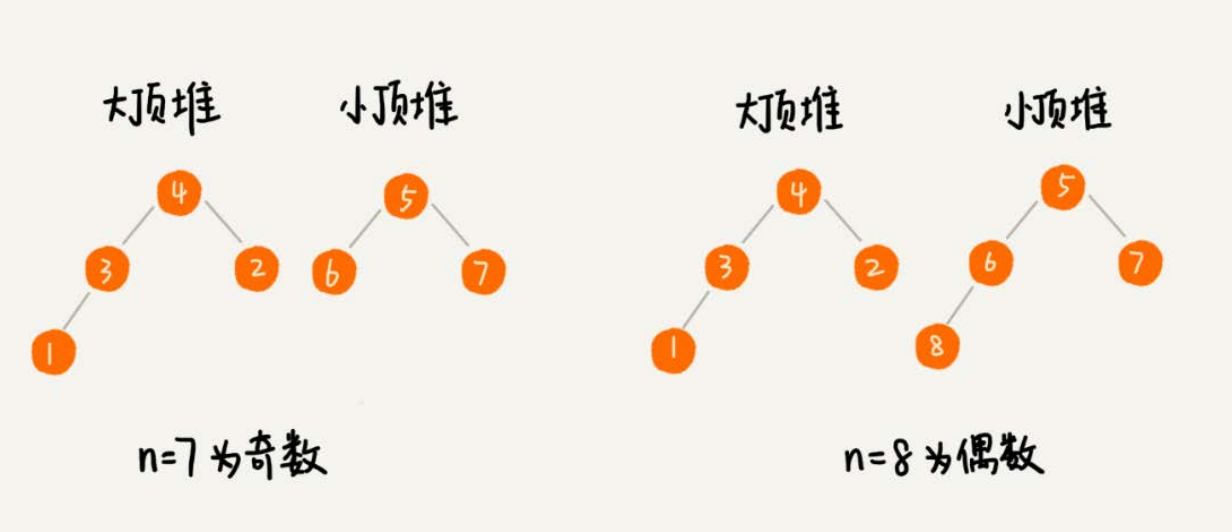
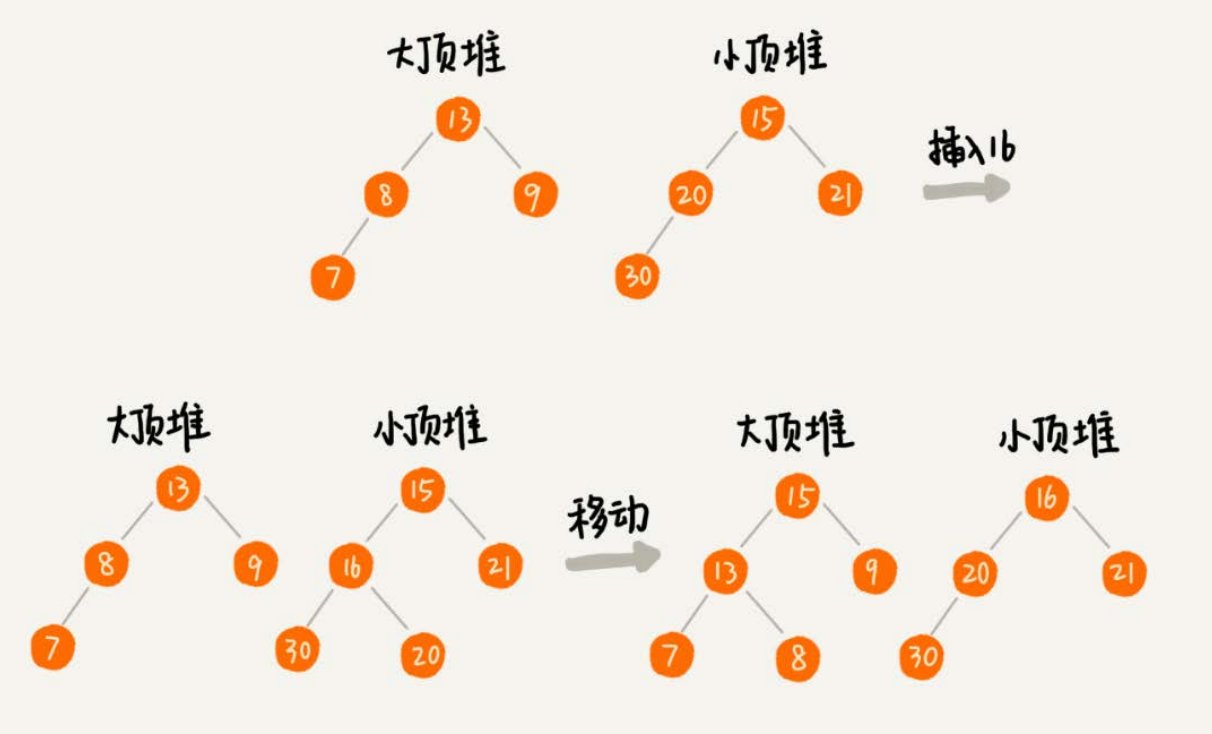
我们需要维护两个堆,一个大顶堆,一个小顶堆。大顶堆中存储前半部分数据,小顶堆中存储后半部分数据,且小顶堆中的数据都大于大顶堆中的数据。
也就是说,如果有n个数据,n是偶数,我们从小到大排序,那前$\frac{n}{2}$个数据存储在大顶堆中,后$\frac{n}{2}$个数据存储在小顶堆中。这样,大顶堆中的堆顶元素就是我们要找的中位数。如果n是奇数,情况是类似的,大顶堆就存储$\frac{n}{2}+1$个数据,小顶堆中就存储$\frac{n}{2}$个数据。
数据是动态变化的,当新添加一个数据的时候,我们如何调整两个堆,让大顶堆中的堆顶元素继续是中位数呢?
如果新加入的数据小于等于大顶堆的堆顶元素,我们就将这个新数据插入到大顶堆;如果新加入的数据大于等于小顶堆的堆顶元素,我们就将这个新数据插入到小顶堆。
这个时候就有可能出现,两个堆中的数据个数不符合前面约定的情况:如果n是偶数,两个堆中的数据个数都是$\frac{n}{2}$;如果n是奇数,大顶堆有$\frac{n}{2}+1$个数据,小顶堆有$\frac{n}{2}$个数据。这个时候,我们可以从一个堆中不停地将堆顶元素移动到另一个堆,通过这样的调整,来让两个堆中的数据满足上面的约定。
于是,我们就可以利用两个堆,一个大顶堆、一个小顶堆,实现在动态数据集合中求中位数的操作。插入数据因为需要涉及堆化,所以时间复杂度变成了O(logn),但是求中位数我们只需要返回大顶堆的堆顶元素就可以了,所以时间复杂度就是O(1)。
实际上,利用两个堆不仅可以快速求出中位数,还可以快速求其他百分位的数据。比如:如何快速求接口的99%响应时间?
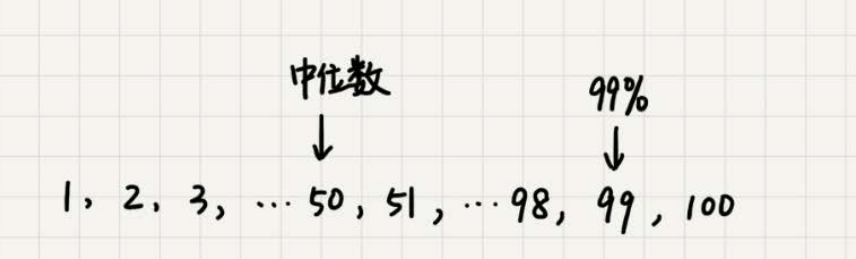
中位数的概念就是将数据从小到大排列,处于中间位置,就叫中位数,这个数据会大于等于前面50%的数据。99百分位数的概念可以类比中位数,如果将一组数据从小到大排列,这个99百分位数就是大于前面99%数据的那个数据。
假设有100个数据,分别是1,2,3,……,100,那99百分位数就是99,因为小于等于99的数占总个数的99%。
如果有100个接口访问请求,每个接口请求的响应时间都不同,比如55毫秒、100毫秒、23毫秒等,我们把这100个接口的响应时间按照从小到大排列,排在第99的那个数据就是99%响应时间,也叫99百分位响应时间。
我们维护两个堆,一个大顶堆,一个小顶堆。假设当前总数据的个数是n,大顶堆中保存n99%个数据,小顶堆中保存n1%个数据。大顶堆堆顶的数据就是我们要找的99%响应时间。
每次插入一个数据的时候,我们要判断这个数据跟大顶堆和小顶堆堆顶数据的大小关系,然后决定插入到哪个堆中。如果这个新插入的数据比大顶堆的堆顶数据小,那就插入大顶堆;如果这个新插入的数据比小顶堆的堆顶数据大,那就插入小顶堆。
但是,为了保持大顶堆中的数据占99%,小顶堆中的数据占1%,在每次新插入数据之后,我们都要重新计算,这个时候大顶堆和小顶堆中的数据个数,是否还符合99:1这个比例。如果不符合,我们就将一个堆中的数据移动到另一个堆,直到满足这个比例。移动的方法类似前面求中位数的方法。
如何快速获取到 Top10 最热门的搜索关键词
假设现在我们有一个包含10亿个搜索关键词的日志文件,如何快速获取到 Top10 最热门的搜索关键词呢?
假设我们选用散列表。我们就顺序扫描这10亿个搜索关键词。当扫描到某个关键词时,我们去散列表中查询。如果存在,我们就将对应的次数加一;如果不存在,我们就将它插入到散列表,并记录次数为1。以此类推,等遍历完这10亿个搜索关键词之后,散列表中就存储了不重复的搜索关键词以及出现的次数。
然后,我们再根据前面讲的用堆求Top K的方法,建立一个大小为10的小顶堆,遍历散列表,依次取出每个搜索关键词及对应出现的次数,然后与堆顶的搜索关键词对比。如果出现次数比堆顶搜索关键词的次数多,那就删除堆顶的关键词,将这个出现次数更多的关键词加入到堆中。
以此类推,当遍历完整个散列表中的搜索关键词之后,堆中的搜索关键词就是出现次数最多的Top 10搜索关键词了。
但是,10亿的关键词还是很多的。我们假设10亿条搜索关键词中不重复的有1亿条,如果每个搜索关键词的平均长度是50个字节,那存储1亿个关键词起码需要5GB的内存空间,而散列表因为要避免频繁冲突,不会选择太大的装载因子,所以消耗的内存空间就更多了。而假设我们的机器只有1GB的可用内存空间,所以我们无法一次性将所有的搜索关键词加入到内存中。这个时候该怎么办呢?
相同数据经过哈希算法得到的哈希值是一样的。我们可以哈希算法的这个特点,将10亿条搜索关键词先通过哈希算法分片到10个文件中。
具体可以这样做:我们创建10个空文件00,01,02,……,09。我们遍历这10亿个关键词,并且通过某个哈希算法对其求哈希值,然后哈希值同10取模,得到的结果就是这个搜索关键词应该被分到的文件编号。
对这10亿个关键词分片之后,每个文件都只有1亿的关键词,去除掉重复的,可能就只有1000万个,每个关键词平均50个字节,所以总的大小就是500MB。1GB的内存完全可以放得下。
我们针对每个包含1亿条搜索关键词的文件,利用散列表和堆,分别求出Top 10,然后把这个10个Top 10放在一块,然后取这100个关键词中,出现次数最多的10个关键词,这就是这10亿数据中的Top 10最频繁的搜索关键词了。
思考
有一个访问量非常大的新闻网站,我们希望将点击量排名Top 10的新闻摘要,滚动显示在网站首页banner上,并且每隔1小时更新一次。如果你是负责开发这个功能的工程师,你会如何来实现呢?